 Fourth Order Runge-Kuuta Equations
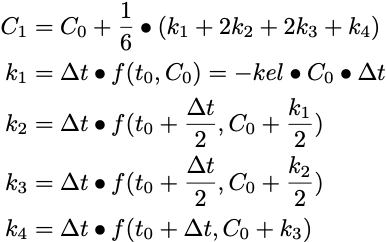
Fourth Order Runge-Kuuta Equations Figure 27.3.1 Equations for the Fourth Order Runge-Kutta Method
return to the Course index
previous | next
Fourth Order Runge-Kuuta Equations Figure 27.3.1 Equations for the Fourth Order Runge-Kutta Method
Notice the time at which the first derivatives (f terms, i.e. differential equations) are determined. Calculations are made at the initial time, two at half the stepsize beyond the initial time and at the final time. These four calculations allow the use of larger overall stepsizes with good accuracy. The method can be represented graphically.
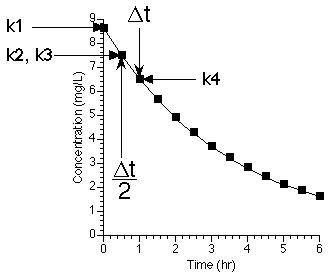
Figure 27.3.2 Plot of Cp versus time Illustrating the 4th order Runge-Kutta Method
Compare the accuracy using the fourth order Runge-Kutta with the accuracy achieved with Euler's method. As with the previous Euler's method example the initial value is 100 and the rate constant is 0.3 hr-1.
| Stepsize | Numerical | Analytical |
|---|---|---|
| 1 | 74.084 | 74.082 |
| 0.5 | 86.071 | 86.071 |
| 0.25 | 92.774 | 92.774 |
| 0.1 | 97.044 | 97.045 |
This seems to be an efficient method of numerically integrating differential equations. However, what stepsize should we use? We could repeat the calculation with a smaller stepsize, say half the previous value. If the two estimates were within limits we could confirm that they were both satisfactory. The problem is that this would require 8 more calculations. That is the original four calculation plus the additional 8 for the re-calculation with the stepsize half the previous value. If the accuracy is not sufficient even more calculations would be needed. One solution to this inefficiency is the Runge-Kutta-Fehlberg method.
Material on this website should be used for Educational or Self-Study Purposes Only
Copyright © 2001 - 2026 David W. A. Bourne (david@boomer.org)
 | A game to aid in interpreting Prescription Sig instructions See how many Sigs you can catch before you run out of lives |
|